


机器人和机械手有何区别?
机械手与机器人的区别在于机械手是按照固定的或者预先设定好的程序,实现模仿人工手臂的动作,通过各轨迹运动,在工业领域实现物料的运输和搬运,并同时可以操持工具完成指定任务。机器人在机械手的固定程序基础上,可以通过自身的动力及智能程序完成非特…

机械手与机器人的区别在于机械手是按照固定的或者预先设定好的程序,实现模仿人工手臂的动作,通过各轨迹运动,在工业领域实现物料的运输和搬运,并同时可以操持工具完成指定任务。机器人在机械手的固定程序基础上,可以通过自身的动力及智能程序完成非特…


ROS(Robot OperatingSystem)是开源的机器人系统平台。使用这个之后,机器人就可以看见东西、测绘、导航,或是以最新的算法作用于周围的环境当中。假如想要制造复杂的机器人,已经准备好的ROS程序代码就能派上用场。
?关节机器人也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。
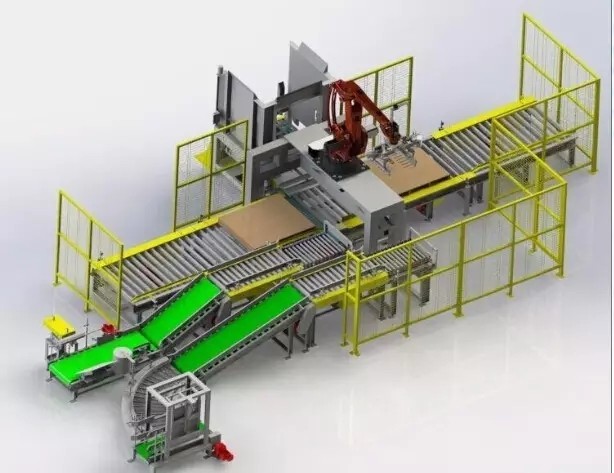
目前,食品饮料包装行业的机器人作业基本属于工作站的形式,从分拣到包装、码垛乃至搬运全部由机器人完成不仅考验着自动化生产线的技术布局,而且有较高成本压力,况且,部分产品的部分工序尚难以用机器人完成,因此如何发挥机器人的高效性是一个值得长期探讨…

经常可以看到扫地机器人的用户说:他家的扫地机器人在工作的时候,会经常被“困住”,无法动弹,导致扫地效率大大降低。为什么会被“困住”?有解决方案吗?今天为大家提供一个防卡死困住的解决方案。

顺序控制的基本思路,即要将设备的动作细分为单个动作步,每个步执行一个操作。且步与步之间通过对应的转换条件连接,及步动作切换。严格按照此思路,选择合理的程序实现结构,即可轻易完成顺序控制要求的功能。

Q:仙知SRC系列核心控制器是否支持我们用户进行二次开发?A:仙知对外开放标准的API协议,支持用户进行二次开发。Q:通过SRC系列核心控制器进行移动机器人打造,支持哪些驱动器、电机品牌产品?A:目前仙知SRC系列核心控制器已适配MOTEC…
?机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度。通常自由度作为机器人的技术指标,能反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。
“简言之,AI 是一门打造智能机器的学科,而‘机器学习’让这些机器更智能。AI 通过机器学习得以实现。”AI 涵盖的范畴众多,机器学习是其中发展最快、最引人注目的一个分支。
