


智能机器人按智能程度分类可分为哪几种?
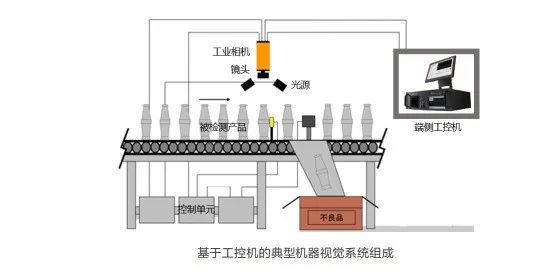
智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。


CRT-DMC660MF 示教系统简易说明1. 系统构成1.1 DMC660M 6 轴运动控制器自主研发的新型多轴运动控制系统应用平台;支持标准 Modbus 协议;六轴步进电机、伺服电机控制;自带输

当前,大多数可移动机器人的功能都还处于很初级的阶段,对它们而言,要想足够智能地完成某些工作依然是一个严峻的挑战。如何为机器人设计一种类似“人脑”的大脑结构,来提升其智能化程度,一直是近年来的研究热点。
在工业机器人中,减速机三大重要构件之一,成本可占到机器人总成本的三分之一。目前能满足工业机器人减速机要求的只有精密谐波减速机、精密行星减速机、精密RV减速机三种。
设想一下,如果人们需要一个能爬楼梯的机器人,那么这个机器人应该是什么的形状?它是应该像人一样有两条腿?还是应该像一只蚂蚁一样有六条腿?设计出合适的形状,对于机器人穿越特定地形的能力来讲是至关重要的。但是,不可能通过人工设计来构建和测试每一种…
力控制一般泛指机器人应用领域中,利用力传感器作为反馈装置,将力反馈信号与位置控制(或速度控制)输入信号相结合,通过相关的力/位混合算法,实现的力/位混合控制技术。也称力/位混合控制技术,简称力控制。