


基于5G拓展激光导航移动机器人新应用
激光导航移动机器人因其能够适应复杂的应用场景和繁琐指令需求,以及在精益化柔性生产方面展示出来的无与伦比的优势,已成为目前搬运机器人的高水平代表,并在越来越多的智能制造域得以投入使用。不过受原有技术体系

激光导航移动机器人因其能够适应复杂的应用场景和繁琐指令需求,以及在精益化柔性生产方面展示出来的无与伦比的优势,已成为目前搬运机器人的高水平代表,并在越来越多的智能制造域得以投入使用。不过受原有技术体系

喷涂机器人又叫喷漆机器人(spray painting robot), 是可进行自动喷漆或喷涂其他涂料的工业机器人,喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等
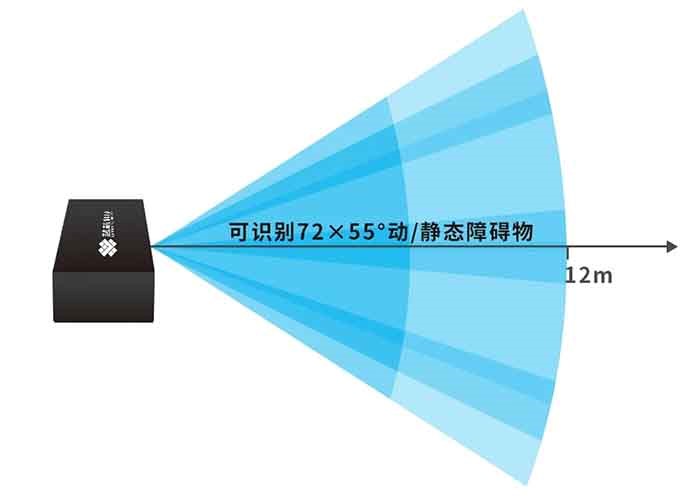
蓝芯科技自创立以来,就立志做新一代工业移动机器人,通过深度视觉赋予移动机器人三维视觉感知能力,提高移动机器人的安全性和稳定性。本次发布的新产品3D视觉传感器Eagle-M3,是蓝芯科技视觉产品研发中心为移动机器人“量身打造”的第三代高性价比…
AGV机器人运用5G技术后,在工业自动化和工业物流领域,尽显柔性与灵活。在5G的加持下,借助低时延、高带宽、大连接传输特性,激光导航AGV将迎来全新的应用模式,在原有技术体系下,受传输时延、带宽瓶颈制约,为确保应用的灵活性,激光导航AGV的…
四轴SCARA机器人和六轴关节式机器人中,四轴机器人是特别为高速取放作业而设计的,而六轴机器人则提供了更高的生产运动灵活性。四轴机器人SCARA机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个金属杆和夹持器组成
长期固定运输路径此类场景可以选择实线导引AGV。如果是工厂的点到点运输场景,业务逻辑固定,长时间不需调整,流程简单,作业面积小,那么实线导引AGV有价格优势,选择实线导引AGV既能解决问题,又节约成本
工业机器人的驱动系统,按动力源分为气动、液压和电动。也有由三种基本类型组合成的复合式驱动系统。气压驱动该系统具有速度快、系统结构简单、维修方便、价格低等优点。但是由于气压装置的工作压强低,不易精确定位,一般仅用于工业机器人末端执行器的驱动
减速机是机器人的关键部件,目前主要使用两种类型的减速机:谐波齿轮减速机和RV减速机。谐波传动方法由美国发明家C.WaltMusser于20世纪50年代中期发明。谐波齿轮减速机主要由波发生器、柔性齿轮和
近日,加州大学圣地亚哥分校的工程师们创造了一种轻便、低成本的四足软体机器人,它通过气动回路就能保持系统控制和运动,并且不需要任何电子设备驱动。该项目由加州大学圣地亚哥分校 Michael T.Tolley 教授领导,发布在 Science …
科学技术持续发展与创新,推动着生产力的不断进步。自工业革命以来,机械化运作逐渐取代了人力劳动,机械智能化技术成为了当今时代发展的主旋律,极大地推动了人类社会的进步,并在一定程度上维护了社会发展的相对和谐性
机器人感知系统把机器人各种内部状态信息和环境信息从信号转变为机器人自身或者机器人之间能够理解和应用的数据、信息,除了需要感知与自身工作状态相关的机械量,如位移、速度、加速度、力和力矩外,视觉感知技术是工业机器人感知的一个重要方面
为了提高工作效率,且使机器人能用尽可能短的时间完成特定的任务,必须有合理的运动规划。离线运动规划分为路径规划和轨迹规划。路径规划的目标是使路径与障碍物的距离尽量远同时路径的长度尽量短;轨迹规划的目的主要是机器人关节空间移动中使得机器人的运行…
工作空间(Work space)是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说

日前,KDD2021论文录取结果出炉,今年共有1541篇有效投稿,其中238篇论文被接收,接收率为15.44%,相比KDD2020的接收率16.9%有所下降。深兰科技的论文《AutoSmart: An
运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人按操作机坐标形式分以下几类:1)直角坐标型工业机器人其运动部分由三个相互垂直的直线移动(即PPP)组成,其工作空间图形为长方形。它在各个轴向的移动距离,可在各个坐标轴上直接读出,直观性强,易