


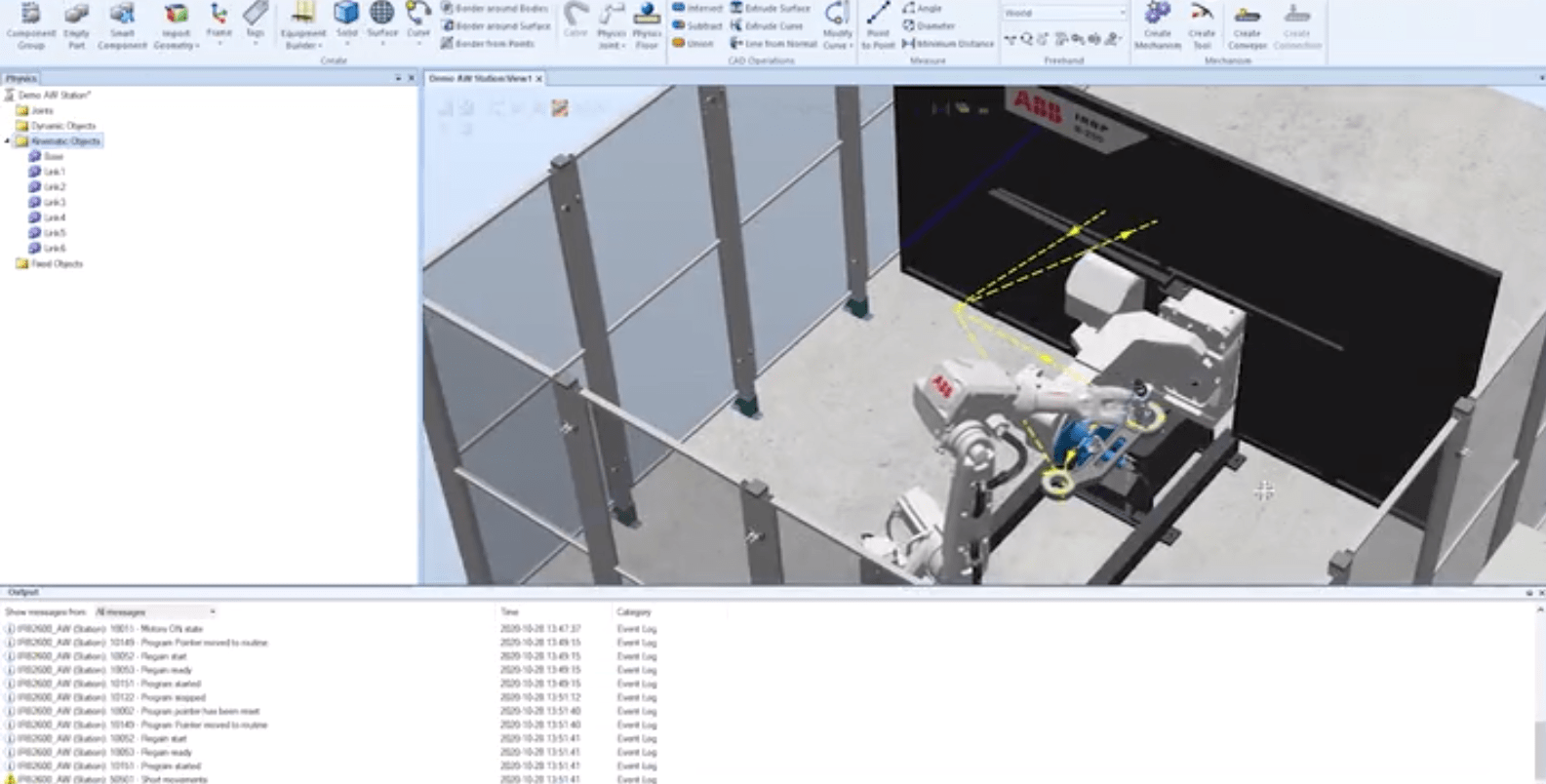
机器人编程、RobotWare与机器人装配的综合探讨
机器人编程是为使机器人完成特定任务而设置的动作顺序描述,RobotWare是ABB提供的机器人应用软件总称,而机器人装配则是将零件组装成合格产品的过程。
机器人编程是为使机器人完成特定任务而设置的动作顺序描述,RobotWare是ABB提供的机器人应用软件总称,而机器人装配则是将零件组装成合格产品的过程。


本文主要介绍了机器人常见的故障,包括通信故障、控制柜故障、硬件故障等,并介绍了开展机器人的失效分析工作的步骤。为解决工业机器人在低温或高温环境下的性能异常,可采取温度适应性设计、温度补偿、环境控制等措施。为确保机器人安全、可靠、高效运行,需…
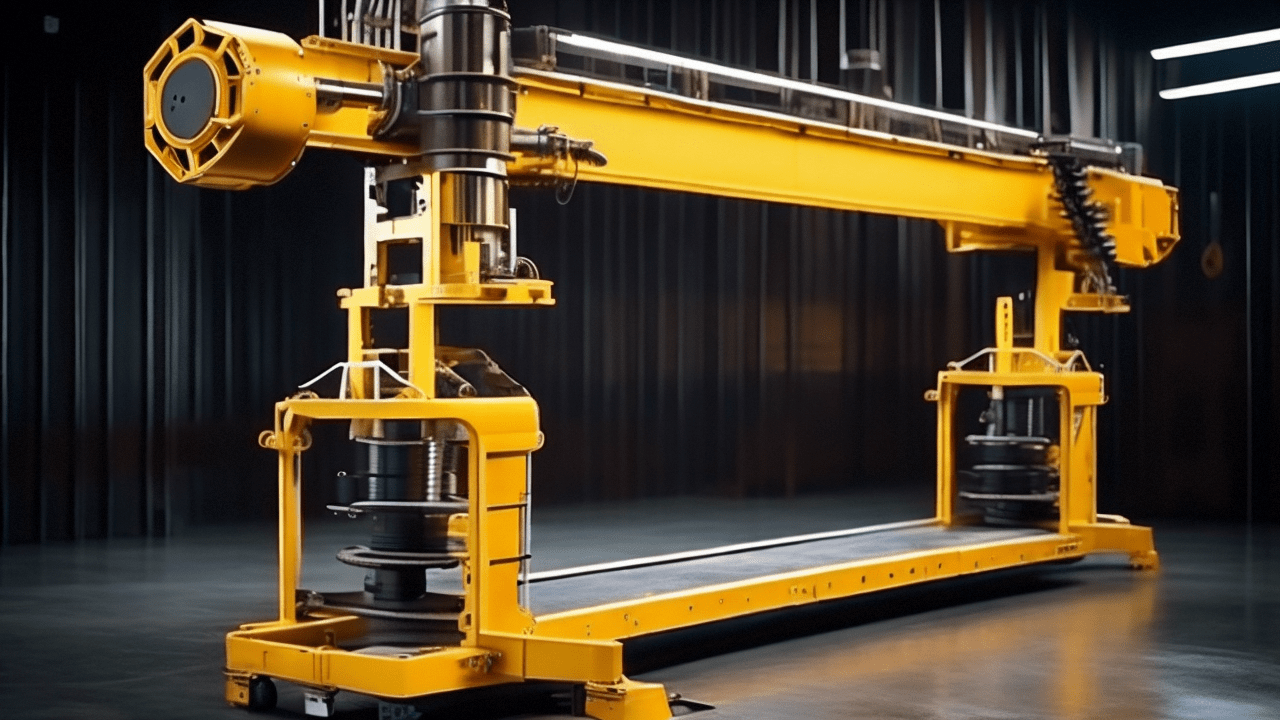
固都(Güdel)是一家来自瑞士的公司,成立于1954年,专注于直线运动模块和机器人地轨的设计与制造。古德尔是该公司的中文译名。该公司在桁架机械手领域有着丰富的经验和专业知识,被认为是行业内的重要品牌之一。
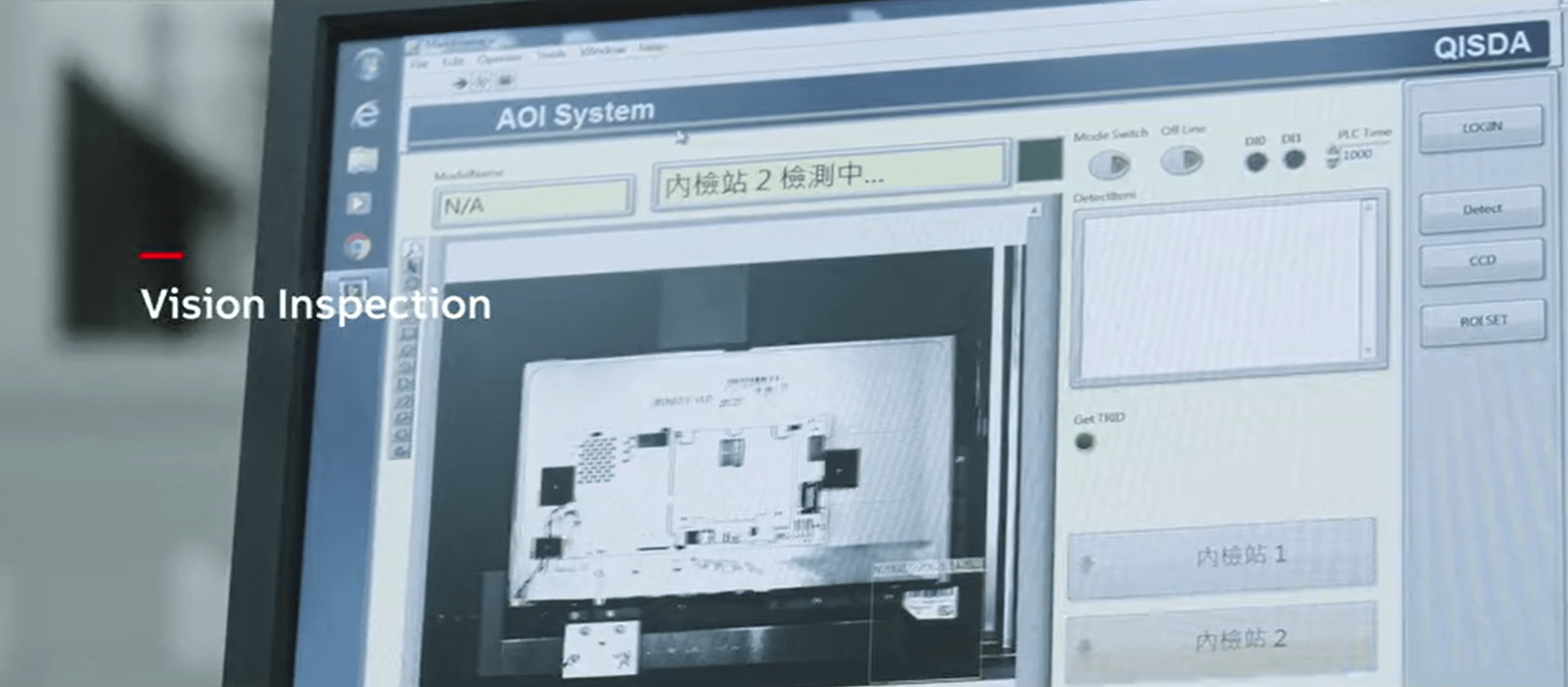
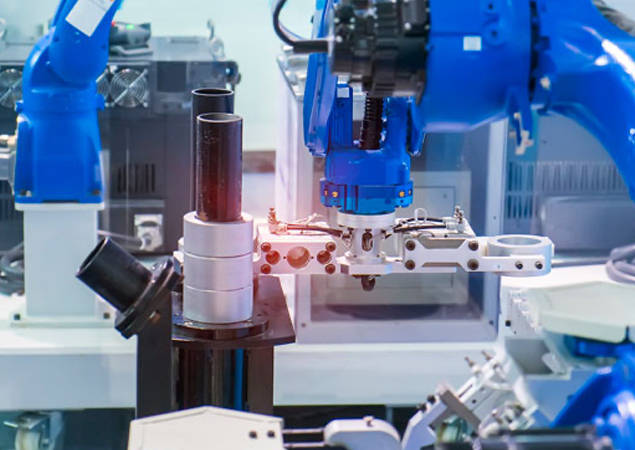
本文介绍了三种机器人技术在智能制造中的应用,分别是机器人视觉检测、机器人零部件运送和拾取以及机器人装卸。这些技术可以提高生产效率、降低人工成本、减少生产错误和提高产品质量,帮助实现智能制造的目标。
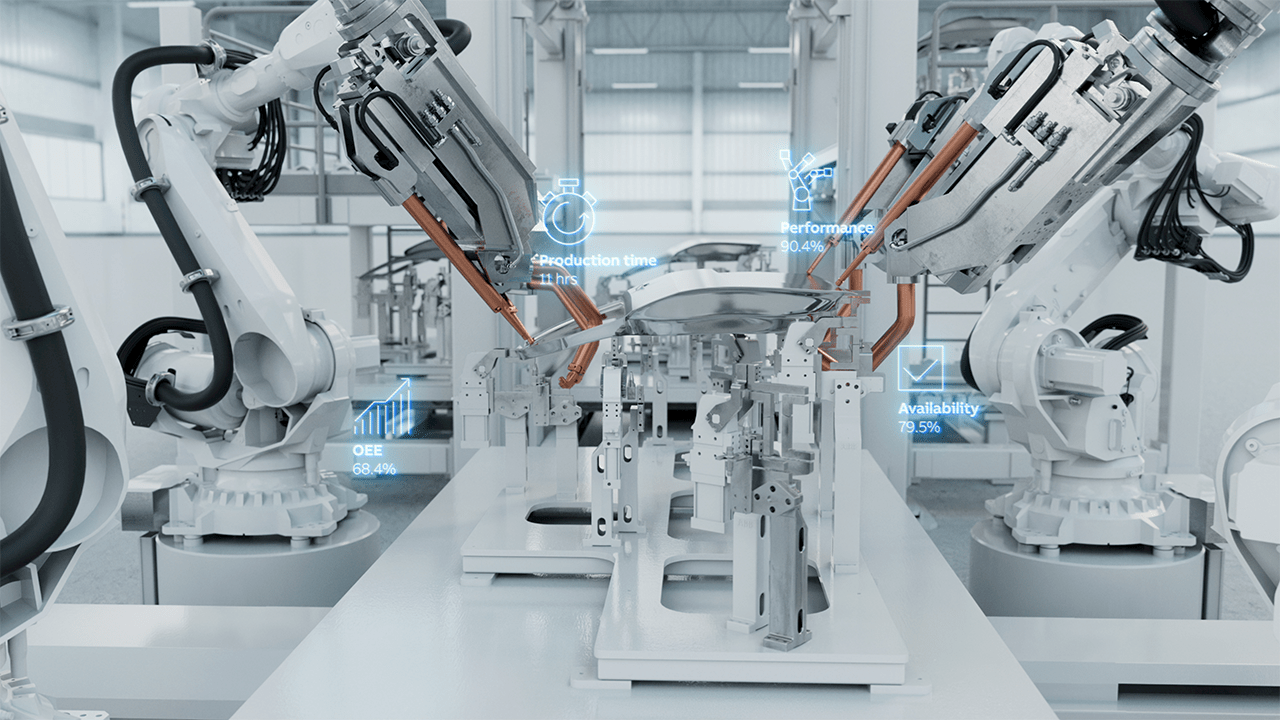

本文介绍了工业机器人的三大部分六大系统,以及协作机器人的定义和应用。工业机器人由机械、电气和软件三大部分组成,包括驱动、控制、感知、操作、通信和人机交互六大系统。协作机器人作为新型工业机器人,具有友好性和感知能力,能与人协同工作。ABB、库…
FANUC 机器人技术在生产过程中具有重要作用。面对常见问题,用户需要掌握解决方法,确保机器人稳定运行。同时,用户还要注重机器人的日常维护与管理,降低故障发生率,提高生产效率。通过不断探索与实践,用户可以充分发挥 FANUC 机器人技术的优…
本文将提供库卡KUKA机器人的学习资料,解答常见问题,并介绍机器人的使用基础问答。这是一份全面介绍KUKA工业机器人的学习资料,涵盖了从基本操作到故障处理的各种常见问题。

本文全面介绍了安川电机YASKAWA的机器人技术,包括机器人、控制器、伺服驱动、变频器等方面的常见问题解答,以及相关的技术词汇表。通过阅读本文,读者可以深入了解安川电机的机器人技术,解决实际应用中的问题,提高工作效率。

以上内容主要介绍了工业机器人的控制方式和按用途分类的类型,以及协作机器人与工业机器人的区别,最后分析了焊接机器人和人工焊接在效率、精度、安全性和成本方面的差异。工业机器人的控制方式包括点位控制、连续轨迹控制、力(力矩)控制和智能控制。根据用…
本文主要讨论了工业机器人在冲压行业的应用,以及在打磨应用中需要考虑的要素。此外,还介绍了工业机器人运维员和操作员的区别,以及控制握力的方式。通过本文,你可以了解到工业机器人在不同领域的应用和相关的技术细节。
本文介绍了机器人的版本、数模图的作用、变位机的应用领域以及快换装置的优点。机器人的版本指的是机器人的不同型号或更新迭代;数模图则是用于展示机器人的外观和结构;变位机主要应用于焊接、搬运、装配等领域;而快换装置则可以提高生产效率、灵活性和安全…
本文详细介绍了安川工业机器人的使用安全、设备开关机操作规范,以及如何进行选型、工具设定、工具校准、动作坐标系和安全模式变更操作,以及新建程序和复制、删除、重命名程序。这些内容为使用者提供了全面的操作指南,确保机器人的安全、高效运行。

本文探讨了工业机器人的选型方法、工业机器人码垛工作站的设备组成,以及机器人在航空制造业的应用。同时,介绍了机器人如何完成避障实现智能行走。这些内容为我们了解工业机器人提供了全面的视角,展示了其在航空制造业中的应用前景,以及机器人避障技术的智…
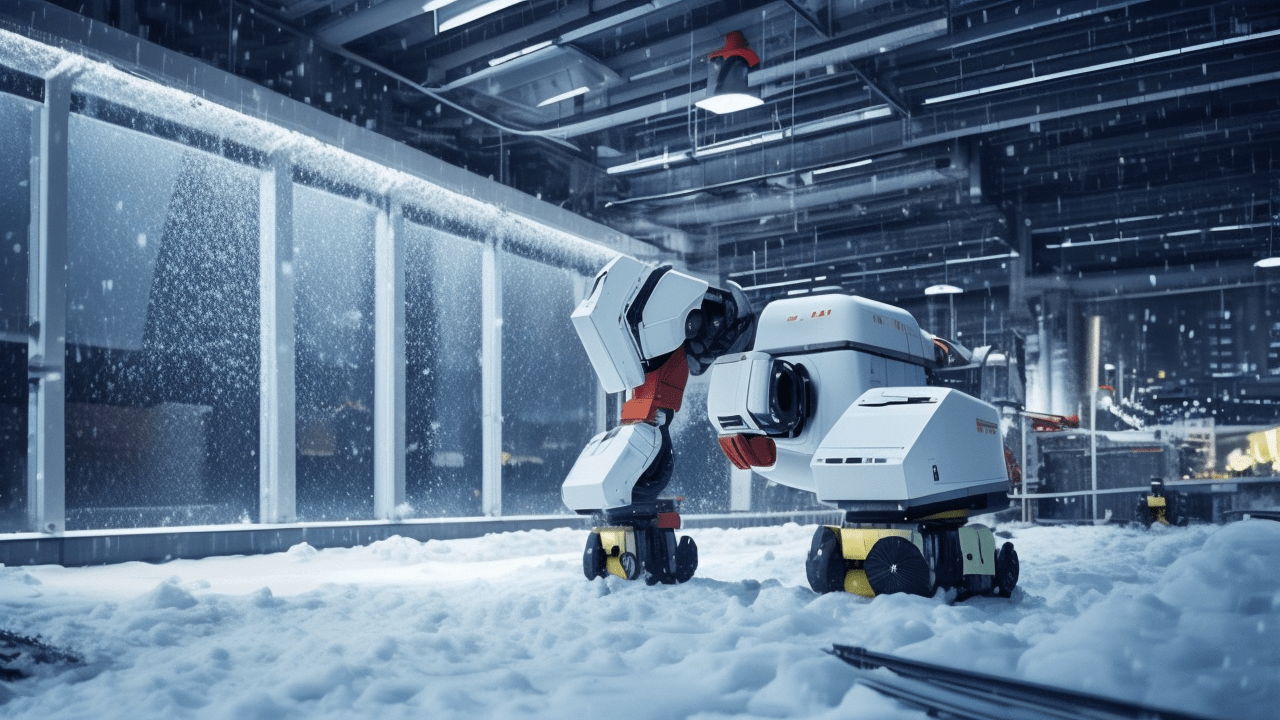
在冬季,机器人面临着诸多挑战,如温度过低可能导致警报停机,潮湿气候可能加大保养难度。为确保机器人正常运行,我们需要关注其润滑油使用情况、清洁与维护、润滑、检查与更换等方面。